并联拾取机器人控制系统
1、简介
并联高速拾取机器人是用于工业、医药、食品等行业中执行物品搬运、摆放、装箱等任务的工业机器人。并联高速拾取机器人控制系统集成机械、电子、信息、智能控制、计算机建模等先进技术,实现了对目标物品的视觉定位、抓取、搬运、旋转与摆放,可对自动化流水生产线中无序或任意摆放的物品进行抓取与分拣。最高拾取速度150件/分,定位精度0.1mm。
2、技术特色
■ 最大搬运速度150件/分
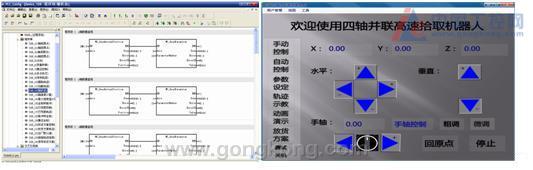
■ 四轴高速、高精度同步控制
■ 视觉定位、智能识别目标物体位置、尺寸与旋转角度
■ 轨迹规划与NURBS曲线插补,运动平滑无抖动
■ 分布式控制,支持多机协同工作
3、系统功能