运动控制频道






























-
 产品速递|重塑性能边界!Elmo Titanium系列四大核心产品全集解读
产品速递|重塑性能边界!Elmo Titanium系列四大核心产品全集解读在迈向工业智能化的进程中,每一次深刻的技术革新,都持续推动着机器性能边界的拓展。
-
 3C电子制造设备中,鸣志AK系列高性能步进产品方案
3C电子制造设备中,鸣志AK系列高性能步进产品方案在3C电子(尤其是智能手机)的自动化装配线上,零部件的精准、高速分选与转运是保障整线生产节拍与质量的关键环节。
-

-
 医疗机器人案例合辑 | Elmo从精准手术到高效康复的全景应用
医疗机器人案例合辑 | Elmo从精准手术到高效康复的全景应用在医疗健康领域快速发展的今天,精准、可靠、高效的运动控制已成为决定设备性能的关键。
-
 破局 | 揭秘 Elmo 如何以第三代半导体技术重新定义运动控制?
破局 | 揭秘 Elmo 如何以第三代半导体技术重新定义运动控制?在半导体封装、精密检测、人形机器人等高端装备的最前沿,设备制造商们正面临一个极限挑战:如何在不断缩小的物理空间内,爆发出更极致的动态性能?
-
 埃斯顿EM5G系列伺服电机在锂电行业的应用
埃斯顿EM5G系列伺服电机在锂电行业的应用在新能源产业高速发展的当下,锂电制造对设备运动控制的精度、稳定性与适配性要求持续升级,埃斯顿EM5G系列伺服电机凭借核心技术优势,成为锂电产线的核心动力解决方案。
-
 精准检测新标杆|固高科技赋能五工位镜头终检机智能高效升级
精准检测新标杆|固高科技赋能五工位镜头终检机智能高效升级在镜头模组终检领域,传统的镜头终检设备存在多工位同步性差、装夹定位精度不足与检测响应滞后三大痛点,进而导致终检效率低下、缺陷漏检率偏高的问题。固高科技针对以上痛点推出GVN系列高性能多轴网络运动控制卡 GSHD系列高性能伺服驱动器解决方案,以"高速同步控制 微米级精度"为核心,助力五工位镜头终检机实现全流程性能升级,并..
-
 西克黑科技 | 轻松读懂BiSS-C通讯协议
西克黑科技 | 轻松读懂BiSS-C通讯协议在工业自动化与精密运动控制领域,高效、可靠的通讯协议是连接控制器与传感器(如编码器)的核心桥梁。作为德国西克(SICK)推出的高性能伺服反馈编码器,ELx35系列凭借其对BiSS-C®协议的深度适配,在高动态定位、多圈绝对值反馈等场景中表现优异。本文将用“生活化”的方式聊——把ELx35编码器和BiSS-C协议的关系,想象成“快递员送包裹”和“..
-
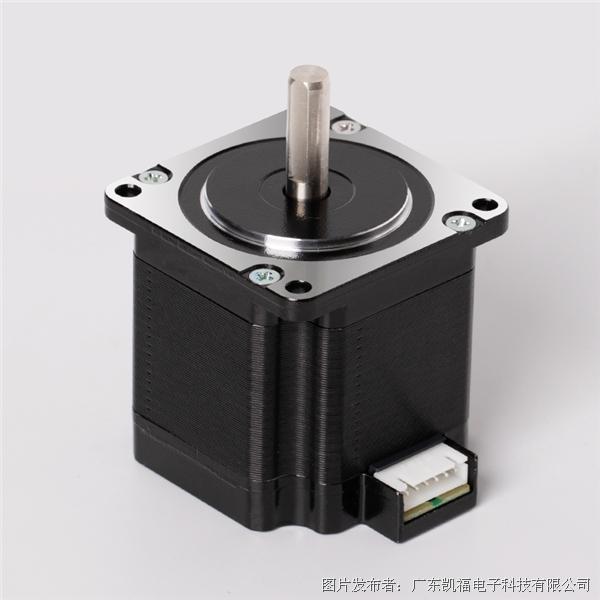 凯福科技两相57步进电机Y07-59D1-3039
凯福科技两相57步进电机Y07-59D1-3039两相57步进电机为直流型,分为单出轴和双出轴两种方式,步距角为1.8°,角度误差±0.09°,绝缘耐压500V AC/分钟,绝缘电阻100MΩ,马达表面可承受100℃高温,大力矩、低噪音、运行平滑。
 2026-01-22
2026-01-22标签: 凯福步进电机 Y07-59D1-3039
-
 耦合设备性能跃迁|固高伺服驱动器实现速度和精度纳米级双突破
耦合设备性能跃迁|固高伺服驱动器实现速度和精度纳米级双突破当前国内光耦合设备普遍面临耦合效率低、耦合精度不足的痛点,这一技术瓶颈已成为制约国内硅光模块产业高质量发展的关键因素。而耦合设备性能短板的核心症结,在于设备上关键耦合轴稳态误差波动大,耦合过程轴微步运动到位响应迟缓。
-
 双奖加冕,智控未来 | 鸣志于CIAA25峰会载誉而归,创新实力再获权威认证!
双奖加冕,智控未来 | 鸣志于CIAA25峰会载誉而归,创新实力再获权威认证!2025年12月18日,CIAA25 运动控制/直驱产业发展高峰论坛暨颁奖典礼在深圳圆满落幕。鸣志凭借持续的产品技术创新、稳定可靠的优良品质以及深厚的业界口碑,成功荣获 “CMCD 2025年度运动控制领域最具影响力企业品牌” 与 “CMCD 2025年度运动控制领域设计创新奖” 两项大奖。这充分彰显了鸣志产品与技术在自动化领域的竞争优势,并获得..
-
 聚力同行 智创未来|2025安浦鸣志渠道商会议圆满落幕
聚力同行 智创未来|2025安浦鸣志渠道商会议圆满落幕岁末十二月,安浦鸣志于深圳、上海、太仓成功举办三场区域渠道商会议。会议以“聚力同行,智创未来”为主题,汇聚来自华南、华东、中北部三大区域逾130位合作伙伴代表。
-
应用案例分享 | 自动扎袋更稳、更快、更省心——鸣志助力包装行业智能化升级!
包装是生产线的“最后一公里”,也是影响产品品质与生产效率的关键环节。很多大型企业对包装品质、密封性能与自动化效率要求更是严苛。
-
 智能控制,极致灵活 | 鸣志重磅推出AK系列绝对式编码器步进伺服系统
智能控制,极致灵活 | 鸣志重磅推出AK系列绝对式编码器步进伺服系统制造业正在进入以 模型驱动数字化、智能控制闭环化、AI自动普及化为特征的新阶段。对运动控制的要求已从传统的精度与稳定性,扩展到数据可追溯、运动可预测、系统可自适应 的更高层级。鸣志全新推出AK系列绝对式编码器步进伺服系统,以全新架构与多模式控制能力,为新一代精密设备带来性能跃升。
- +加载更多
 2026-01-30
2026-01-30-
产品速递|重塑性能边界!Elmo Titanium系列四大核心产品全集解读
在迈向工业智能化的进程中,每一次深刻的技术革新,都持续推动着机器性能边界的拓展。
-
3C电子制造设备中,鸣志AK系列高性能步进产品方案
在3C电子(尤其是智能手机)的自动化装配线上,零部件的精准、高速分选与转运是保障整线生产节拍与质量的关键环节。
-
-
埃斯顿EM5G系列伺服电机在锂电行业的应用
在新能源产业高速发展的当下,锂电制造对设备运动控制的精度、稳定性与适配性要求持续升级,埃斯顿EM5G系列伺服电机凭借核心技术优势,成为锂电产线的核心动力解决方案。
- +更多资讯
-
产品速递|重塑性能边界!Elmo Titanium系列四大核心产品全集解读
在迈向工业智能化的进程中,每一次深刻的技术革新,都持续推动着机器性能边界的拓展。
-
3C电子制造设备中,鸣志AK系列高性能步进产品方案
在3C电子(尤其是智能手机)的自动化装配线上,零部件的精准、高速分选与转运是保障整线生产节拍与质量的关键环节。
-
埃斯顿EM5G系列伺服电机在锂电行业的应用
在新能源产业高速发展的当下,锂电制造对设备运动控制的精度、稳定性与适配性要求持续升级,埃斯顿EM5G系列伺服电机凭借核心技术优势,成为锂电产线的核心动力解决方案。
-
智能控制,极致灵活 | 鸣志重磅推出AK系列绝对式编码器步进伺服系统
制造业正在进入以 模型驱动数字化、智能控制闭环化、AI自动普及化为特征的新阶段。对运动控制的要求已从传统的精度与稳定性,扩展到数据可追溯、运动可预测、系统可自适应 的更高层级。鸣志全新推出AK系列绝对式编码器步进伺服系统,以全新架构与多模式控制能力,为新一代精密设备带来性能跃升。
-
 LS电气特殊电机高精协同与流体精准控制在半导体设备中的创新实践
LS电气特殊电机高精协同与流体精准控制在半导体设备中的创新实践在高端半导体制造领域,设备的性能边界正由核心部件的极限能力所定义。LS电气凭借对半导体工艺的深刻洞察,创新性地将高精度运动控制与超精密流体管理两大核心技术深度融合,构建了业界领先的“动力-流体”一体化控制解决方案。
-
 LS电气 Spinner高速中空轴电机
LS电气 Spinner高速中空轴电机LS电气Spinner高速中空轴电机是专为半导体制造设备开发的高性能直驱电机,适用于涂胶、显影、清洗、刻蚀等核心制程环节。
- +更多资讯
-
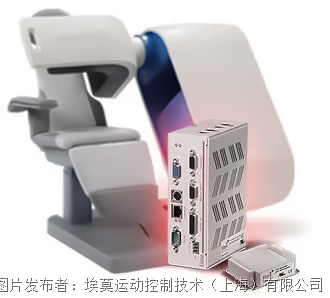
医疗机器人案例合辑 | Elmo从精准手术到高效康复的全景应用
在医疗健康领域快速发展的今天,精准、可靠、高效的运动控制已成为决定设备性能的关键。
-
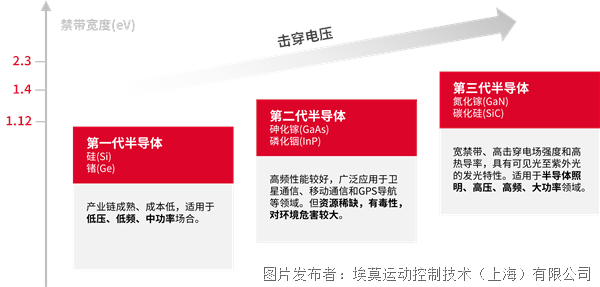
破局 | 揭秘 Elmo 如何以第三代半导体技术重新定义运动控制?
在半导体封装、精密检测、人形机器人等高端装备的最前沿,设备制造商们正面临一个极限挑战:如何在不断缩小的物理空间内,爆发出更极致的动态性能?
-
精准检测新标杆|固高科技赋能五工位镜头终检机智能高效升级
在镜头模组终检领域,传统的镜头终检设备存在多工位同步性差、装夹定位精度不足与检测响应滞后三大痛点,进而导致终检效率低下、缺陷漏检率偏高的问题。固高科技针对以上痛点推出GVN系列高性能多轴网络运动控制卡 GSHD系列高性能伺服驱动器解决方案,以"高速同步控制 微米级精度"为核心,助力五工位镜头终检机实现全流程性能升级,并..
-
西克黑科技 | 轻松读懂BiSS-C通讯协议
在工业自动化与精密运动控制领域,高效、可靠的通讯协议是连接控制器与传感器(如编码器)的核心桥梁。作为德国西克(SICK)推出的高性能伺服反馈编码器,ELx35系列凭借其对BiSS-C®协议的深度适配,在高动态定位、多圈绝对值反馈等场景中表现优异。本文将用“生活化”的方式聊——把ELx35编码器和BiSS-C协议的关系,想象成“快递员送包裹”和“..
-
耦合设备性能跃迁|固高伺服驱动器实现速度和精度纳米级双突破
当前国内光耦合设备普遍面临耦合效率低、耦合精度不足的痛点,这一技术瓶颈已成为制约国内硅光模块产业高质量发展的关键因素。而耦合设备性能短板的核心症结,在于设备上关键耦合轴稳态误差波动大,耦合过程轴微步运动到位响应迟缓。
-
双奖加冕,智控未来 | 鸣志于CIAA25峰会载誉而归,创新实力再获权威认证!
2025年12月18日,CIAA25 运动控制/直驱产业发展高峰论坛暨颁奖典礼在深圳圆满落幕。鸣志凭借持续的产品技术创新、稳定可靠的优良品质以及深厚的业界口碑,成功荣获 “CMCD 2025年度运动控制领域最具影响力企业品牌” 与 “CMCD 2025年度运动控制领域设计创新奖” 两项大奖。这充分彰显了鸣志产品与技术在自动化领域的竞争优势,并获得..
- +更多资讯
-
应用案例分享 | 自动扎袋更稳、更快、更省心——鸣志助力包装行业智能化升级!
包装是生产线的“最后一公里”,也是影响产品品质与生产效率的关键环节。很多大型企业对包装品质、密封性能与自动化效率要求更是严苛。
-
以卓越性能“驯服”水流:CDA10伺服驱动在造浪机上的应用
远离海岸线,却能感受巨浪的磅礴力量;身处城市中心,亦可体验冲浪的极致激情……这一切,都得益于现代造浪机的诞生。随着科技的不断进步,造浪设备的广泛应用为水上活动增添了更多的乐趣和刺激。
-
迈信EP5S伺服主轴在数控榫卯车铣加工中心上的应用
数控榫卯加工中心是集车削、铣削、钻孔、开槽等于一体的多轴联动木工数控设备,核心是在单一平台完成榫头、卯眼、异形榫等全流程加工,精度可达±0.03mm,适配实木家具、仿古建筑、定制家居等行业规模化与高精度生产。榫卯车铣加工中心是传统木工技艺与现代数控技术完美结合的产物。它让承载着千年智慧的榫卯结构,能够以工业化、数字化的方..
-
从“卷价格”到“卷价值”——松下四边封包装机如何以精准智造重塑包装行业标杆
松下通过“算法封边”技术,降低了四边封包装废品率,此前,行业内废品率平均为5%,而松下方案所达成的废品率仅为行业水平的十分之一,即0.5%,以数据驱动替代经验调机,实现工艺智能化的关键突破。
-
行业应用案例|Elmo 与机器狗共赴秘境
在电力井下、极寒之地或救援现场等人类难以长期深入的极端作业环境,新一代“四足机器人”正成为不可或缺的探索先锋。然而,严苛环境本身便是对其核心驱动系统的“极限测试”。伺服驱动器作为机器狗的“运动关节”,必须在极度紧凑的空间内提供强大动力,同时在雨水、沙尘、电磁干扰等复杂条件下,确保每一次动作都精准、稳定、可靠。..
-
解决方案:凯福科技优化桌面式点胶机空间及效率
点胶机是一种专门对流体进行控制的自动化机器,又称涂胶机、滴胶机、打胶机、灌胶机等。点胶机主要用于产品工艺中的胶水、油漆以及其他液体精确点、注、涂、点滴到每个产品的精确位置,可以用来实现打点、画线、圆形或弧形。它广泛应用于电子、照明、汽车等行业,如手机按键点胶、手机电池封装、笔记本电池封装、LED荧光粉点胶、车灯封装等。 ..
- +更多资讯
-
【正运动小助手】机械手标定示教操作步骤
1)操作各关节轴运动到类型规定零点位置。 2)按理论机械手参数建立机械手连接。 3)控制机械手末端点运动到校正点。 4)记录关节轴坐标并填入Table数组。 5)通过【FRAME_CAL】指令实现参数校正。 6)校正出实际零点时的关节轴绝对坐标与机械参数,输出到指令指定的Table位置。 7)【Rapidstop】指令取消机械手模式。 8)手动运动..
2026-01-29 -
【正运动技术】二维螺距补偿
假设工况3:X轴和Y轴的丝杆螺距均有异常需要补偿,且X轴和Y轴的安装夹角是135度。 假设X轴的激光干涉仪数据如下: '运动到1mm处,激光干涉仪打出来实际是0.9mm处,所以需要补偿的脉冲 =0.1*units '运动到2mm处,激光干涉仪打出来实际是1.8mm处,所以需要补偿的脉冲 =0.2*units '运动到3mm处,激光干涉仪打出来实际是..
2026-01-28 -
【正运动技术】二维螺距补偿(三)
假设工况2:XY轴的螺距均有异常需要补偿,但X轴和Y轴安装是垂直的。 假设X轴的激光干涉仪数据如下: '运动到1mm处,激光干涉仪打出来实际是0.9mm处,所以需要补偿的脉冲=0.1*units '运动到2mm处,激光干涉仪打出来实际是1.8mm处,所以需要补偿的脉冲=0.2*units '运动到3mm处,激光干涉仪打出来实际是2.7mm处,所以需要补偿的脉冲..
2026-01-27 -
【正运动技术】二维螺距补偿(二)
01二维螺距算法通过Basic编程快速验证效果假设工况1:X轴和Y轴的丝杆螺距正常,但X轴和Y轴安装不垂直,假设安装夹角是135度。 步骤一: 规划开始补偿点,补偿间距,补偿的行数和列数。 '初始化二维螺距补偿的相关参数TableId = 1000 '补偿数据的Table起始点 StartMposX = 0 'X轴开始补偿的位..
2026-01-23 -
【正运动技术】二维螺距补偿(一)
01二维螺距补偿应用场景 02二维螺距补偿指令说明 正运动二维螺距补偿指令使用的注意点: 1.必须先设置ATYPE,然后设置补偿;修改ATYPE时,必须先关闭补偿! 2.设置补偿时,轴要位于IDLE的停止状态! 3.开始补偿点的坐标填写的是轴的MPOS坐标! 4.带编码器反馈的轴类型,不同位置补多少个脉冲,是根据编码器位置确定..
2026-01-21 -
【正运动技术】运动缓冲原理
运动缓冲原理 在运行运动指令时,控制器提供了一个缓冲区来保存进入运动缓冲的运动缓冲队列。运动指令存到运动缓冲区,在缓冲区里取出指令再执行,省略了程序扫描的时间,大大提升了实时性,同时也使得程序能正常向下扫描,不会堵塞。 ZMotion运动控制器具有多级的运动缓冲,并且遵循先进先出原则。当运动缓冲开启的时..
2026-01-16 - 更多资讯